This paper presents an approach that generates the overall trajectory of mobile manipulators for a complex mission consisting of several sub-tasks. Parametric dynamic movement primitives (PDMPs) can quickly generalize the online motion of robot manipulation by learning multiple demonstrations in ...
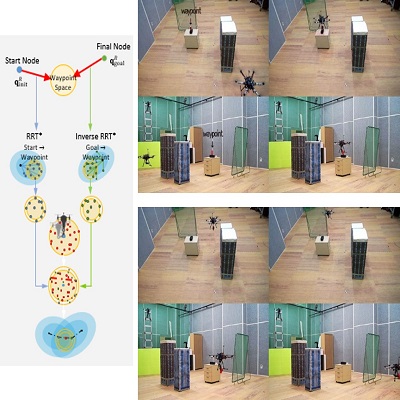
This paper presents a motion planning approach for an aerial pick-and-place task where an aerial manipulator is supposed to pick up or place an object at locations specified as way-points. In particular, we focus on situations where such way-point constraints are imposed on certain partial state ...
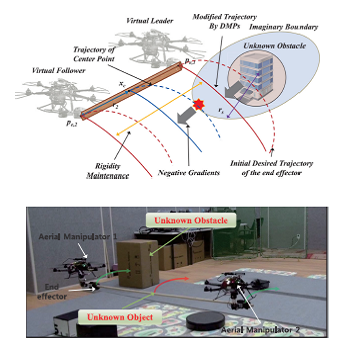
Parametric dynamic movement primitives (PDMPs) are powerful motion representation algorithms, which encode multiple demonstrations and generalize them. As an online trajectory from PDMPs emulates the provided demonstrations, managing the safety guarantee of the demonstrations for a given scenario...
Cooperation among multiple aerial vehicles could provide a solution for overcoming limited payload restrictions. Multiple aerial vehicles can carry a heavy or large object safely by sharing the load, alleviating the risk involved in exerting considerable inertia on a single vehicle.
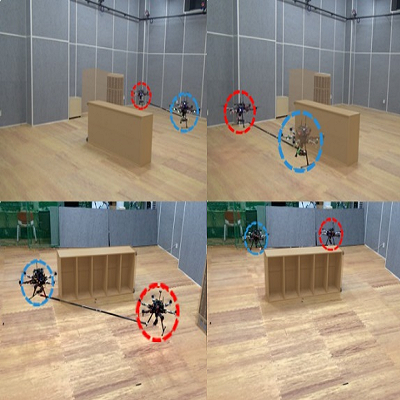
Abstract: This letter presents a viable framework that integrates control, estimation of unknown payload, safety management, and obstacle avoidance for cooperative transportation in unknown environments using multiple aerial manipulators. Unlike existing approaches for cooperative manipulation ba...
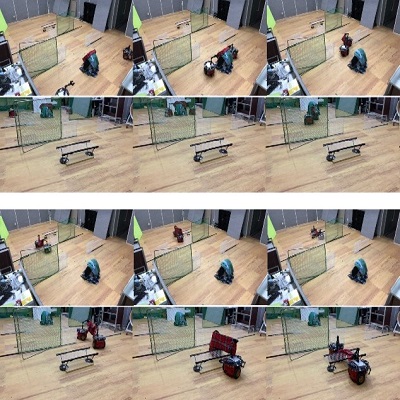
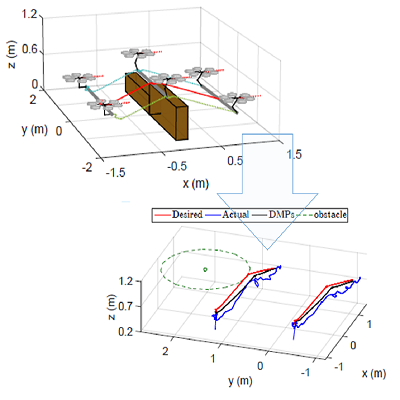
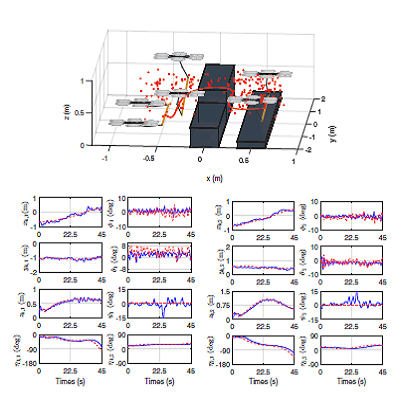
This paper presents a motion planning approach for cooperative transportation using aerial robots. We describe a framework based on Parametric Dynamic Movement Primitives (PDMPs) for coordinating multiple aerial robots and their manipulators quickly in an environment cluttered with obstacles. In ...
Abstract: This paper presents planning and control synthesis for multiple aerial manipulators to transport a common object. Each aerial manipulator that consists of a hexacopter and a two-degree-of-freedom robotic arm is controlled by an augmented adaptive sliding mode controller based on a close...
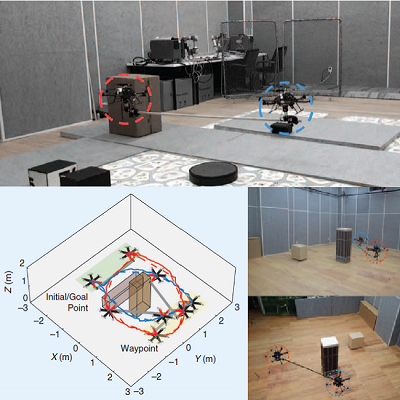
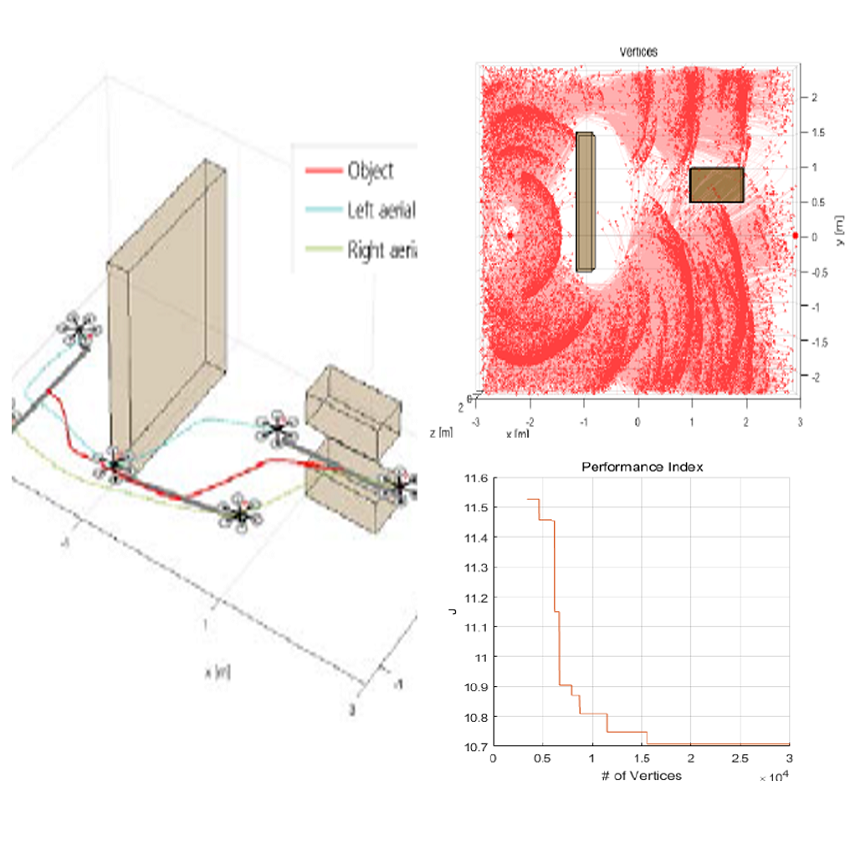
Abstract: This paper focuses on the optimal motion planning problem for cooperative aerial manipulation. We use the rapidly exploring random trees star (RRT) algorithm that finds feasible paths quickly and optimizes them. For local planning within RRT, we developed a trajectory planner using Bezi...
Abstract: This paper presents planning and control of multiple aerial manipulators for cooperative transportation. Individual aerial manipulators which consist of a hexacopter and 2-DOF robotic arm are controlled by an augmented adaptive sliding mode controller based on a closed-chain robot dynam...
This paper presents an approach that generates the overall trajectory of mobile manipulators for a complex mission consisting of several sub-tasks. Parametric dynamic movement primitives (PDMPs) can quickly generalize the online motion of robot manipulation by learning multiple demonstrations in ...
Parametric dynamic movement primitives (PDMPs) are powerful motion representation algorithms, which encode multiple demonstrations and generalize them. As an online trajectory from PDMPs emulates the provided demonstrations, managing the safety guarantee of the demonstrations for a given scenario...
Cooperation among multiple aerial vehicles could provide a solution for overcoming limited payload restrictions. Multiple aerial vehicles can carry a heavy or large object safely by sharing the load, alleviating the risk involved in exerting considerable inertia on a single vehicle.
Abstract: This letter presents a viable framework that integrates control, estimation of unknown payload, safety management, and obstacle avoidance for cooperative transportation in unknown environments using multiple aerial manipulators. Unlike existing approaches for cooperative manipulation ba...
Abstract: This paper presents planning and control synthesis for multiple aerial manipulators to transport a common object. Each aerial manipulator that consists of a hexacopter and a two-degree-of-freedom robotic arm is controlled by an augmented adaptive sliding mode controller based on a close...
This paper presents a motion planning approach for an aerial pick-and-place task where an aerial manipulator is supposed to pick up or place an object at locations specified as way-points. In particular, we focus on situations where such way-point constraints are imposed on certain partial state ...
This paper presents a motion planning approach for cooperative transportation using aerial robots. We describe a framework based on Parametric Dynamic Movement Primitives (PDMPs) for coordinating multiple aerial robots and their manipulators quickly in an environment cluttered with obstacles. In ...
Abstract: This paper focuses on the optimal motion planning problem for cooperative aerial manipulation. We use the rapidly exploring random trees star (RRT) algorithm that finds feasible paths quickly and optimizes them. For local planning within RRT, we developed a trajectory planner using Bezi...
Abstract: This paper presents planning and control of multiple aerial manipulators for cooperative transportation. Individual aerial manipulators which consist of a hexacopter and 2-DOF robotic arm are controlled by an augmented adaptive sliding mode controller based on a closed-chain robot dynam...