
[T-ASE2022] Learning and Generalizing Cooperative Manipulation Skills using Parametric Dynamic Movement Primitives
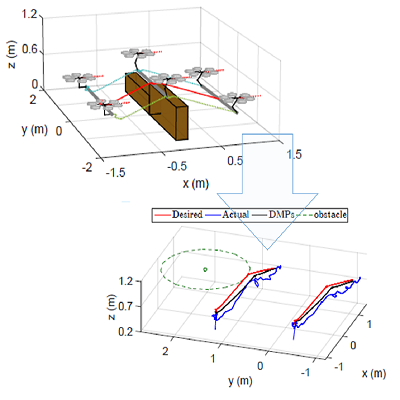
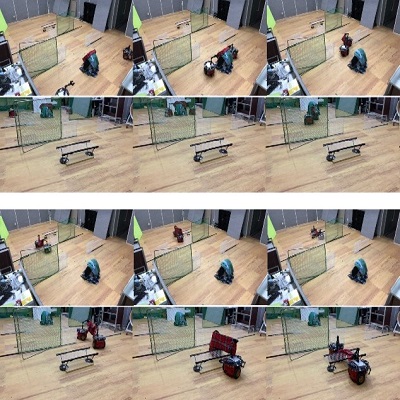
This paper presents an approach that generates the overall trajectory of mobile manipulators for a complex mission consisting of several sub-tasks. Parametric dynamic movement primitives (PDMPs) can quickly generalize the online motion of robot manipulation by learning multiple demonstrations in ...